|
SH4ZAM! 0.1.0
Fast math library for the Sega Dreamcast's SH4 CPU
|
|
SH4ZAM! 0.1.0
Fast math library for the Sega Dreamcast's SH4 CPU
|
Go to the source code of this file.
Enumerations | |
| enum | shz_xmtrx_reg { SHZ_XMTRX_XF0 , SHZ_XMTRX_XF1 , SHZ_XMTRX_XF2 , SHZ_XMTRX_XF3 , SHZ_XMTRX_XF4 , SHZ_XMTRX_XF5 , SHZ_XMTRX_XF6 , SHZ_XMTRX_XF7 , SHZ_XMTRX_XF8 , SHZ_XMTRX_XF9 , SHZ_XMTRX_XF10 , SHZ_XMTRX_XF11 , SHZ_XMTRX_XF12 , SHZ_XMTRX_XF13 , SHZ_XMTRX_XF14 , SHZ_XMTRX_XF15 } |
Functions | |
Accessors | |
Setting and retrieving individual XMTRX register values. | |
| float | shz_xmtrx_read (shz_xmtrx_reg_t xf) SHZ_NOEXCEPT |
| void | shz_xmtrx_write (shz_xmtrx_reg_t xf, float value) SHZ_NOEXCEPT |
| shz_vec4_t | shz_xmtrx_read_row (unsigned int index) SHZ_NOEXCEPT |
| shz_vec4_t | shz_xmtrx_read_col (unsigned int index) SHZ_NOEXCEPT |
| void | shz_xmtrx_write_row (unsigned int index, shz_vec4_t vector) SHZ_NOEXCEPT |
| void | shz_xmtrx_write_col (unsigned int index, shz_vec4_t vector) SHZ_NOEXCEPT |
| void | shz_xmtrx_swap_rows (unsigned int index1, unsigned int index2) SHZ_NOEXCEPT |
| void | shz_xmtrx_swap_cols (unsigned int index1, unsigned int index2) SHZ_NOEXCEPT |
Loading | |
Routines for loading XMTRX contents from memory. | |
| void | shz_xmtrx_load_4x4 (const shz_mat4x4_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_wxyz_4x4 (const shz_mat4x4_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_unaligned_4x4 (const float matrix[16]) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_cols_4x4 (const shz_vec4_t *c1, const shz_vec4_t *c2, const shz_vec4_t *c3, const shz_vec4_t *c4) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_rows_4x4 (const shz_vec4_t *r1, const shz_vec4_t *r2, const shz_vec4_t *r3, const shz_vec4_t *r4) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_transpose_4x4 (const shz_mat4x4_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_transpose_unaligned_4x4 (const float matrix[16]) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_3x4 (const shz_mat3x4_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_cols_4x3 (const shz_vec4_t *c1, const shz_vec4_t *c2, const shz_vec4_t *c3) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_rows_3x4 (const shz_vec4_t *r1, const shz_vec4_t *r2, const shz_vec4_t *r3) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_3x3 (const shz_mat3x3_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_transpose_3x3 (const float *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_2x2 (const shz_mat2x2_t *matrix) SHZ_NOEXCEPT |
Storing | |
Routines for saving XMTRX contents to memory. | |
| void | shz_xmtrx_store_4x4 (shz_mat4x4_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_store_unaligned_4x4 (float matrix[16]) SHZ_NOEXCEPT |
| void | shz_xmtrx_store_transpose_4x4 (shz_mat4x4_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_store_transpose_unaligned_4x4 (float matrix[16]) SHZ_NOEXCEPT |
| void | shz_xmtrx_store_3x4 (shz_mat3x4_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_store_3x3 (shz_mat3x3_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_store_transpose_3x3 (shz_mat3x3_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_store_2x2 (shz_mat2x2_t *matrix) SHZ_NOEXCEPT |
Initialization | |
Routines used to initialize the entirety of XMTRX. | |
| void | shz_xmtrx_init_identity (void) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_identity_safe (void) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_zero (void) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_one (void) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_fill (float value) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_translation (float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_scale (float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_rotation_x (float x) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_rotation_y (float y) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_rotation_z (float z) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_rotation_xyz (float xAngle, float yAngle, float zAngle) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_rotation_zyx (float zAngle, float yAngle, float xAngle) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_rotation_zxy (float zAngle, float xAngle, float yAngle) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_rotation_yxz (float yAngle, float xAngle, float zAngle) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_rotation (float angle, float xAxis, float yAxis, float zAxis) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_diagonal (float x, float y, float z, float w) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_upper_triangular (float col1, shz_vec2_t col2, shz_vec3_t col3, shz_vec4_t col4) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_lower_triangular (shz_vec4_t col1, shz_vec3_t col2, shz_vec2_t col3, float col4) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_symmetric_skew (float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_outer_product (shz_vec4_t x, shz_vec4_t y) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_permutation_wxyz (void) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_permutation_yzwx (void) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_screen (float width, float height) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_lookat (shz_vec3_t eye, shz_vec3_t center, shz_vec3_t up) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_ortho (float left, float right, float bottom, float top, float znear, float zfar) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_frustum (float left, float right, float bottom, float top, float znear, float zfar) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_perspective (float fov, float aspect, float znear) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_rotation_quat (shz_quat_t q) SHZ_NOEXCEPT |
Apply Operation | |
Updates only relevant values of XMTRX based on the given transform. | |
| void | shz_xmtrx_apply_4x4 (const shz_mat4x4_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_unaligned_4x4 (const float matrix[16]) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_transpose_4x4 (const shz_mat4x4_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_transpose_unaligned_4x4 (const float matrix[16]) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_reverse_4x4 (const shz_mat4x4_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_reverse_unaligned_4x4 (const float matrix[16]) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_reverse_transpose_4x4 (const shz_mat4x4_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_reverse_transpose_unaligned_4x4 (const float matrix[16]) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_3x4 (const shz_mat3x4_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_3x3 (const shz_mat3x3_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_transpose_3x3 (const shz_mat3x3_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_2x2 (const shz_mat2x2_t *matrix) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_translation (float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_scale (float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_rotation_x (float x) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_rotation_y (float y) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_rotation_z (float z) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_rotation_xyz (float xAngle, float yAngle, float zAngle) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_rotation_zyx (float zAngle, float yAngle, float xAngle) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_rotation_zxy (float zAngle, float xAngle, float yAngle) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_rotation_yxz (float yAngle, float xAngle, float zAngle) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_rotation (float angle, float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_rotation_quat (shz_quat_t quat) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_lookat (shz_vec3_t eye, shz_vec3_t center, shz_vec3_t up) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_ortho (float left, float right, float bottom, float top, float znear, float zfar) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_frustum (float left, float right, float bottom, float top, float znear, float zfar) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_perspective (float fov, float aspect, float znear) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_screen (float width, float height) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_symmetric_skew (float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_permutation_wxyz (void) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_permutation_yzwx (void) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_self (void) SHZ_NOEXCEPT |
GL Transformations | |
OpenGL-style 4x4 matrix transforms. | |
| void | shz_xmtrx_translate (float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_xmtrx_scale (float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_xmtrx_rotate_x (float radians) SHZ_NOEXCEPT |
| void | shz_xmtrx_rotate_y (float radians) SHZ_NOEXCEPT |
| void | shz_xmtrx_rotate_z (float radians) SHZ_NOEXCEPT |
| void | shz_xmtrx_rotate_xyz (float xRadians, float yRadians, float zRadians) SHZ_NOEXCEPT |
| void | shz_xmtrx_rotate_zyx (float zRadians, float yRadians, float xRadians) SHZ_NOEXCEPT |
| void | shz_xmtrx_rotate_zxy (float zRadians, float xRadians, float yRadians) SHZ_NOEXCEPT |
| void | shz_xmtrx_rotate_yxz (float yRadians, float xRadians, float zRadians) SHZ_NOEXCEPT |
| void | shz_xmtrx_rotate (float radians, float xAxis, float yAxis, float zAxis) SHZ_NOEXCEPT |
Compound Operations | |
Multiple operations combined into one pipelined transaction. | |
| void | shz_xmtrx_load_apply_4x4 (const shz_mat4x4_t *matrix1, const shz_mat4x4_t *matrix2) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_apply_unaligned_4x4 (const float matrix1[16], const float matrix2[16]) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_store_4x4 (shz_mat4x4_t *out, const shz_mat4x4_t *in) SHZ_NOEXCEPT |
| void | shz_xmtrx_apply_store_unaligned_4x4 (float out[16], const float in[16]) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_apply_store_4x4 (shz_mat4x4_t *out, const shz_mat4x4_t *matrix1, const shz_mat4x4_t *matrix2) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_apply_store_unaligned_4x4 (float out[16], const float matrix1[16], const float matrix2[16]) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_apply_store_3x4 (shz_mat3x4_t *out, const shz_mat3x4_t *matrix1, const shz_mat3x4_t *matrix2) SHZ_NOEXCEPT |
| void | shz_xmtrx_load_apply_store_3x3 (shz_mat3x3_t *out, const shz_mat3x3_t *matrix1, const shz_mat3x3_t *matrix2) SHZ_NOEXCEPT |
Transformations | |
Transforming vectors and points against XMTRX. | |
| shz_vec4_t | shz_xmtrx_transform_vec4 (shz_vec4_t vec) SHZ_NOEXCEPT |
| shz_vec3_t | shz_xmtrx_transform_vec3 (shz_vec3_t vec) SHZ_NOEXCEPT |
| shz_vec2_t | shz_xmtrx_transform_vec2 (shz_vec2_t vec) SHZ_NOEXCEPT |
| shz_vec2_t | shz_xmtrx_transform_point2 (shz_vec2_t pt) SHZ_NOEXCEPT |
| shz_vec3_t | shz_xmtrx_transform_point3 (shz_vec3_t pt) SHZ_NOEXCEPT |
Setters | |
Sets the values of related XMTRX components. | |
| void | shz_xmtrx_set_translation (float x, float y, float z) SHZ_NOEXCEPT |
Getters | |
Gets the values of related XMTRX components. | |
| shz_vec3_t | shz_xmtrx_get_translation (void) SHZ_NOEXCEPT |
Component-Wise Matrix Operations | |
Operations applying each component of a matrix onto XMTRX. | |
| void | shz_xmtrx_add_4x4 (const shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| void | shz_xmtrx_sub_4x4 (const shz_mat4x4_t *mat) SHZ_NOEXCEPT |
Miscellaneous | |
Random operations and conversions on XMTRX. | |
| void | shz_xmtrx_add_symmetric_skew (float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_xmtrx_add_diagonal (float x, float y, float z, float w) SHZ_NOEXCEPT |
| void | shz_xmtrx_transpose (void) SHZ_NOEXCEPT |
| void | shz_xmtrx_negate (void) SHZ_NOEXCEPT |
| void | shz_xmtrx_abs (void) SHZ_NOEXCEPT |
| void | shz_xmtrx_init_fft_weights (float radians) SHZ_NOEXCEPT |
| shz_quat_t | shz_xmtrx_to_quat (void) SHZ_NOEXCEPT |
| float | shz_xmtrx_determinant (void) SHZ_NOEXCEPT |
| void | shz_xmtrx_invert (void) SHZ_NOEXCEPT |
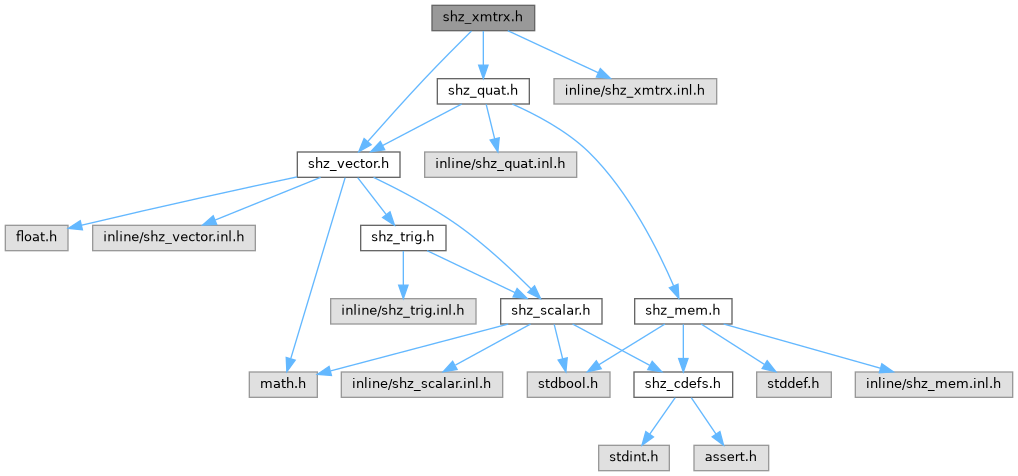
Active Matrix API.
This file provides an API built around manipulating and performing calculations using the SH4's "current" 4x4 matrix, which is held within a secondary back-bank of 16 single-precision floating-point registers.
Definition in file shz_xmtrx.h.
| enum shz_xmtrx_reg |
Registers comprising XMTRX, in the FPU back-bank.
Definition at line 68 of file shz_xmtrx.h.
| float shz_xmtrx_read | ( | shz_xmtrx_reg_t | xf | ) |
Returns the floating-point value held within the given XMTRX register.
| void shz_xmtrx_write | ( | shz_xmtrx_reg_t | xf, |
| float | value ) |
Sets the floating-point value held within the given XMTRX register to value.
| shz_vec4_t shz_xmtrx_read_row | ( | unsigned int | index | ) |
Returns the values at the the given row index, as a 4D vector.
| shz_vec4_t shz_xmtrx_read_col | ( | unsigned int | index | ) |
Returns the values at the given column index, as a 4D vector.
| void shz_xmtrx_write_row | ( | unsigned int | index, |
| shz_vec4_t | vector ) |
Sets the values at the given row index to the given 4D vector.
| void shz_xmtrx_write_col | ( | unsigned int | index, |
| shz_vec4_t | vector ) |
Sets the values at the given column index to the given 4D vector.
| void shz_xmtrx_swap_rows | ( | unsigned int | index1, |
| unsigned int | index2 ) |
Swaps the values of the rows with the given indices.
| void shz_xmtrx_swap_cols | ( | unsigned int | index1, |
| unsigned int | index2 ) |
Swaps the values of the columns with the given indices.
| void shz_xmtrx_load_4x4 | ( | const shz_mat4x4_t * | matrix | ) |
Loads the given 4x4 matrix as XMTRX.
| void shz_xmtrx_load_wxyz_4x4 | ( | const shz_mat4x4_t * | matrix | ) |
Loads the given 4x4 matrix as XMTRX, with the 4th column for translation being loaded as the first column.
| void shz_xmtrx_load_unaligned_4x4 | ( | const float | matrix[16] | ) |
Loads the given array of unaligned 16 float values as the 4x4 XMTRX matrix.
| void shz_xmtrx_load_cols_4x4 | ( | const shz_vec4_t * | c1, |
| const shz_vec4_t * | c2, | ||
| const shz_vec4_t * | c3, | ||
| const shz_vec4_t * | c4 ) |
Sets XMTRX equal to the 4x4 matrix created from the 4 given 4D column vectors.
| void shz_xmtrx_load_rows_4x4 | ( | const shz_vec4_t * | r1, |
| const shz_vec4_t * | r2, | ||
| const shz_vec4_t * | r3, | ||
| const shz_vec4_t * | r4 ) |
Sets XMTRX equal to the 4x4 matrix created from the 4 given 4D row vectors.
| void shz_xmtrx_load_transpose_4x4 | ( | const shz_mat4x4_t * | matrix | ) |
Loads XMTRX with the transpose of the given 4x4 matrix.
| void shz_xmtrx_load_transpose_unaligned_4x4 | ( | const float | matrix[16] | ) |
Loads XMTRX with the transpose of the 4x4 matrix created from the given unaligned array of 16 floats.
| void shz_xmtrx_load_3x4 | ( | const shz_mat3x4_t * | matrix | ) |
Loads the given 3x4 matrix into XMTRX, initializing its remaining elements to identity.
| void shz_xmtrx_load_cols_4x3 | ( | const shz_vec4_t * | c1, |
| const shz_vec4_t * | c2, | ||
| const shz_vec4_t * | c3 ) |
Loads the 3x4 matrix formed from the given 3 4D column vectors into XMTRX.
All remaining elements are initialized to identity matrix values.
| void shz_xmtrx_load_rows_3x4 | ( | const shz_vec4_t * | r1, |
| const shz_vec4_t * | r2, | ||
| const shz_vec4_t * | r3 ) |
Loads the 3x4 matrix formed from the given 3 4D row vectors into XMTRX.
All remaining elements are initialized to identity matrix values.
| void shz_xmtrx_load_3x3 | ( | const shz_mat3x3_t * | matrix | ) |
Loads the given 3x3 matrix into XMTRX, initalizing its remaining elements to identity.
| void shz_xmtrx_load_transpose_3x3 | ( | const float * | matrix | ) |
Loads the transpose of the given 3x3 matrix into XMTRX, initializing its remaining elements to identity.
| void shz_xmtrx_load_2x2 | ( | const shz_mat2x2_t * | matrix | ) |
Loads the given 2x2 matrix into XMTRX, initializing its remaining elements to identity.
| void shz_xmtrx_store_4x4 | ( | shz_mat4x4_t * | matrix | ) |
Stores the current values held within XMTRX into the given 4x4 matrix.
| void shz_xmtrx_store_unaligned_4x4 | ( | float | matrix[16] | ) |
Stores the current values held within XMTRX into the given unaligned 16-float array.
| void shz_xmtrx_store_transpose_4x4 | ( | shz_mat4x4_t * | matrix | ) |
Stores the transpose of the current values held within XMTRX into the given 4x4 matrix.
| void shz_xmtrx_store_transpose_unaligned_4x4 | ( | float | matrix[16] | ) |
Stores the transpose of the the current values held within XMTRX into the given 16-element float array.
| void shz_xmtrx_store_3x4 | ( | shz_mat3x4_t * | matrix | ) |
Stores the top-left 3x4 values currently held within XMTRX into the given matrix.
| void shz_xmtrx_store_3x3 | ( | shz_mat3x3_t * | matrix | ) |
Stores the top-left 3x3 values currently held within XMTRX into the given matrix.
| void shz_xmtrx_store_transpose_3x3 | ( | shz_mat3x3_t * | matrix | ) |
Stores the transpose of the top-left 3x3 values currently held within XMTRX into the given matrix.
| void shz_xmtrx_store_2x2 | ( | shz_mat2x2_t * | matrix | ) |
Stores the top-left 2x2 values currently held within XMTRX into the given matrix.
| void shz_xmtrx_init_identity | ( | void | ) |
Quickly initializes XMTRX to be a 4D identity matrix.
| void shz_xmtrx_init_identity_safe | ( | void | ) |
Safely initializes XMTRX to be a 4D identity matrix.
This routine is guaranteed to properly initialize XMTRX, regardless of NaN values.
| void shz_xmtrx_init_zero | ( | void | ) |
Initializes XMTRX to contain the value of 0.0f for each element.
| void shz_xmtrx_init_one | ( | void | ) |
Initializes XMTRX to contain the value of 1.0f for each element.
| void shz_xmtrx_init_fill | ( | float | value | ) |
Initializes XMTRX to contain the given value for each element.
| void shz_xmtrx_init_translation | ( | float | x, |
| float | y, | ||
| float | z ) |
Initializes XMTRX to be a 3D translation matrix to the given coordinates.
| void shz_xmtrx_init_scale | ( | float | x, |
| float | y, | ||
| float | z ) |
Initializes XMTRX to be a 3D scale matrix with the given dimensions.
| void shz_xmtrx_init_rotation_x | ( | float | x | ) |
Initializes XMTRX to be a 3D rotation matrix by x radians about the X axis.
| void shz_xmtrx_init_rotation_y | ( | float | y | ) |
Initializes XMTRX to be a 3D rotation matrix by y radians about the Y axis.
| void shz_xmtrx_init_rotation_z | ( | float | z | ) |
Initializes XMTRX to be a 3D rotation matrix by z radians about the Z axis.
| void shz_xmtrx_init_rotation_xyz | ( | float | xAngle, |
| float | yAngle, | ||
| float | zAngle ) |
Initializes XMTRX to be a 3D X-Y-Z rotation matrix, with the corresponding angles given in radians.
| void shz_xmtrx_init_rotation_zyx | ( | float | zAngle, |
| float | yAngle, | ||
| float | xAngle ) |
Initializes XMTRX to be a 3D Z-Y-X rotation matrix, with the corresponding angles given in radians.
| void shz_xmtrx_init_rotation_zxy | ( | float | zAngle, |
| float | xAngle, | ||
| float | yAngle ) |
Initializes XMTRX to be a 3D Z-X-Y rotation matrix, with the corresponding angles given in radians.
| void shz_xmtrx_init_rotation_yxz | ( | float | yAngle, |
| float | xAngle, | ||
| float | zAngle ) |
Initializes XMTRX to be a 3D Y-X-Z rotation matrix, with the corresponding angles given in radians.
| void shz_xmtrx_init_rotation | ( | float | angle, |
| float | xAxis, | ||
| float | yAxis, | ||
| float | zAxis ) |
Initializes XMTRX to a 3D rotation matrix of angle radians about the given axis.
| void shz_xmtrx_init_diagonal | ( | float | x, |
| float | y, | ||
| float | z, | ||
| float | w ) |
Initializes XMTRX to be a diagonal matrix with the given diagonal values.
| void shz_xmtrx_init_upper_triangular | ( | float | col1, |
| shz_vec2_t | col2, | ||
| shz_vec3_t | col3, | ||
| shz_vec4_t | col4 ) |
Initializes XMTRX to be an upper triangular matrix with the given column values.
| void shz_xmtrx_init_lower_triangular | ( | shz_vec4_t | col1, |
| shz_vec3_t | col2, | ||
| shz_vec2_t | col3, | ||
| float | col4 ) |
Initializes XMTRX to be a lower triangular matrix with the given column values.
| void shz_xmtrx_init_symmetric_skew | ( | float | x, |
| float | y, | ||
| float | z ) |
Initializes XMTRX to be the 3D symmetric skew matrix formed from the given vector components.
| void shz_xmtrx_init_outer_product | ( | shz_vec4_t | x, |
| shz_vec4_t | y ) |
Initializes XMTRX to the 4D matrix resulting from taking the outer product of the two 4D vectors.
| void shz_xmtrx_init_permutation_wxyz | ( | void | ) |
Initializes XMTRX to a permutation matrix, which reorders the components of transformed vectors to be in WXYZ order.
| void shz_xmtrx_init_permutation_yzwx | ( | void | ) |
Initializes XMTRX to a permutation matrix, which reorders the components of transformed vectors to be in YZWX order.
| void shz_xmtrx_init_screen | ( | float | width, |
| float | height ) |
Initializes XMTRX to the viewport matrix with the given dimensions.
| fr[n + 0] | fr[n + 4] | fr[n + 8] | fr[n + 12] |
|---|---|---|---|
| w*0.5f | 0.0f | 0.0f | w*0.5f |
| 0.0f | -h*0.5f | 0.0f | h*0.5f |
| 0.0f | 0.0f | 1.0f | 0.0f |
| 0.0f | 0.0f | 0.0f | 1.0f |
| void shz_xmtrx_init_lookat | ( | shz_vec3_t | eye, |
| shz_vec3_t | center, | ||
| shz_vec3_t | up ) |
Initializes XMTRX to a "lookAt" view matrix, equivalent to gluLookAt().
| void shz_xmtrx_init_ortho | ( | float | left, |
| float | right, | ||
| float | bottom, | ||
| float | top, | ||
| float | znear, | ||
| float | zfar ) |
Initializes XMTRX to an orthographic projection matrix, equivalent to glOrtho().
| void shz_xmtrx_init_frustum | ( | float | left, |
| float | right, | ||
| float | bottom, | ||
| float | top, | ||
| float | znear, | ||
| float | zfar ) |
Initializes XMTRX to a frustum projection matrix, equivalent to glFrustum().
| void shz_xmtrx_init_perspective | ( | float | fov, |
| float | aspect, | ||
| float | znear ) |
Initializes XMTRX to a perspective projection matrix.
| void shz_xmtrx_init_rotation_quat | ( | shz_quat_t | q | ) |
Initializes XMTRX to a 3D rotation matrix with its orientation given by a quaternion.
| void shz_xmtrx_apply_4x4 | ( | const shz_mat4x4_t * | matrix | ) |
Multiplies and accumulates the given 4x4 matrix onto XMTRX.
| void shz_xmtrx_apply_unaligned_4x4 | ( | const float | matrix[16] | ) |
Multiplies and accumulates the given 16-entry float array as a 4x4 matrix onto XMTRX.
| void shz_xmtrx_apply_transpose_4x4 | ( | const shz_mat4x4_t * | matrix | ) |
Multiplies and accumulates the transpose of the given 4x4 matrix onto XMTRX.
| void shz_xmtrx_apply_transpose_unaligned_4x4 | ( | const float | matrix[16] | ) |
Multiplies and accumulates the transpose of the given 16-entry float array as a 4x4 matrix onto XMTRX.
| void shz_xmtrx_apply_reverse_4x4 | ( | const shz_mat4x4_t * | matrix | ) |
Multiplies and accumulates XMTRX onto matrix, storing the result as XMTRX.
| void shz_xmtrx_apply_reverse_unaligned_4x4 | ( | const float | matrix[16] | ) |
Multiplies and accumulates XMTRX onto the given float array as a 4x4 matrix, storing the result as XMTRX.
| void shz_xmtrx_apply_reverse_transpose_4x4 | ( | const shz_mat4x4_t * | matrix | ) |
Multiplies and accumulates XMTRX onto the transpose of matrix, storing the result as XMTRX.
| void shz_xmtrx_apply_reverse_transpose_unaligned_4x4 | ( | const float | matrix[16] | ) |
Multiplies and accumulates XMTRX onto the transpose of the given float array as a 4x4 matrix, storing the result as XMTRX.
| void shz_xmtrx_apply_3x4 | ( | const shz_mat3x4_t * | matrix | ) |
Multiplies and accumulates the given 3x4 matrix onto XMTRX, not modifying other elements.
| void shz_xmtrx_apply_3x3 | ( | const shz_mat3x3_t * | matrix | ) |
Multiplies and accumulates the given 3x3 matrix onto XMTRX, not modifying other elements.
| void shz_xmtrx_apply_transpose_3x3 | ( | const shz_mat3x3_t * | matrix | ) |
Multiplies and accumulateas the transpose of the given 3x3 matrix onto XMTRX, not modifying other elements.
| void shz_xmtrx_apply_2x2 | ( | const shz_mat2x2_t * | matrix | ) |
Multiplies and accumulates the given 2x2 matrix onto XMTRX, not modifying other elements.
| void shz_xmtrx_apply_translation | ( | float | x, |
| float | y, | ||
| float | z ) |
Adds the values of the given 3 components to the 3D translation components of XMTRX.
| void shz_xmtrx_apply_scale | ( | float | x, |
| float | y, | ||
| float | z ) |
Multiplies the values of the inner 3x3 matrix by the given 3D scaling terms.
| void shz_xmtrx_apply_rotation_x | ( | float | x | ) |
Transforms the values of the inner 3x3 matrix by a rotation matrix of x radians about the X axis.
| void shz_xmtrx_apply_rotation_y | ( | float | y | ) |
Transforms the values of the inner 3x3 matrix by a rotation matrix of y radians about the Y axis.
| void shz_xmtrx_apply_rotation_z | ( | float | z | ) |
Transforms the values of the inner 3x3 matrix by a rotation matrix of z radians about the Z axis.
| void shz_xmtrx_apply_rotation_xyz | ( | float | xAngle, |
| float | yAngle, | ||
| float | zAngle ) |
Multiplies and accumulates XMTRX by a 3D X-Y-Z rotation matrix, with the corresponding angles given in radians.
The transform is applied to the inner 3x3 values within XMTRX, preserving the translational components.
| void shz_xmtrx_apply_rotation_zyx | ( | float | zAngle, |
| float | yAngle, | ||
| float | xAngle ) |
Multiplies and accumulates XMTRX by a 3D Z-Y-X rotation matrix, with the corresponding angles given in radians.
The transform is applied to the inner 3x3 values within XMTRX, preserving the translational components.
| void shz_xmtrx_apply_rotation_zxy | ( | float | zAngle, |
| float | xAngle, | ||
| float | yAngle ) |
Multiplies and accumulates XMTRX by a 3D Z-X-Y rotation matrix, with the corresponding angles given in radians.
The transform is applied to the inner 3x3 values within XMTRX, preserving the translational components.
| void shz_xmtrx_apply_rotation_yxz | ( | float | yAngle, |
| float | xAngle, | ||
| float | zAngle ) |
Multiplies and accumulates XMTRX by a 3D Y-X-Z rotation matrix, with the corresponding angles given in radians.
The transform is applied to the inner 3x3 values within XMTRX, preserving the translational components.
| void shz_xmtrx_apply_rotation | ( | float | angle, |
| float | x, | ||
| float | y, | ||
| float | z ) |
Transforms the values of the inner 3x3 matrix by a rotation matrix of angle radians about the axis with the given components.
| void shz_xmtrx_apply_rotation_quat | ( | shz_quat_t | quat | ) |
Transforms the values of the inner 3x3 matrix by the rotation matrix represented by the given quaternion.
| void shz_xmtrx_apply_lookat | ( | shz_vec3_t | eye, |
| shz_vec3_t | center, | ||
| shz_vec3_t | up ) |
Applies the 3D "lookAt" matrix constructed with the given vector components onto XMTRX. Equivalent to gluLookAt().
| void shz_xmtrx_apply_ortho | ( | float | left, |
| float | right, | ||
| float | bottom, | ||
| float | top, | ||
| float | znear, | ||
| float | zfar ) |
Applies a 2D orthographic projection matrix onto XMTRX, equivalent to glOrtho().
| void shz_xmtrx_apply_frustum | ( | float | left, |
| float | right, | ||
| float | bottom, | ||
| float | top, | ||
| float | znear, | ||
| float | zfar ) |
Applies a frustum projection matrix onto XMTRX, equivalent to glFrustum().
| void shz_xmtrx_apply_perspective | ( | float | fov, |
| float | aspect, | ||
| float | znear ) |
Multiplies and accumulates the perspective matrix constructed from the given values onto XMTRX.
| fr[n + 0] | fr[n + 4] | fr[n + 8] | fr[n + 12] |
|---|---|---|---|
| cot(f)/a | 0.0f | 0.0f | 0.0f |
| 0.0f | cot(f) | 0.0f | 0.0f |
| 0.0f | 0.0f | 0.0f | nz |
| 0.0f | 0.0f | -1.0f | 0.0f |
| void shz_xmtrx_apply_screen | ( | float | width, |
| float | height ) |
Multiplies and accumulates the viewport matrix created with the given components.
| fr[n + 0] | fr[n + 4] | fr[n + 8] | fr[n + 12] |
|---|---|---|---|
| w*0.5f | 0.0f | 0.0f | w*0.5f |
| 0.0f | -h*0.5f | 0.0f | h*0.5f |
| 0.0f | 0.0f | 1.0f | 0.0f |
| 0.0f | 0.0f | 0.0f | 1.0f |
| void shz_xmtrx_apply_symmetric_skew | ( | float | x, |
| float | y, | ||
| float | z ) |
Multiplies and accumulates the 3D symmetric skew matrix with the given components onto XMTRX.
| void shz_xmtrx_apply_permutation_wxyz | ( | void | ) |
Multiplies and accumulates a permutation matrix, which reorders the components of transformed vectors to be in WXYZ order.
| void shz_xmtrx_apply_permutation_yzwx | ( | void | ) |
Multiplies and accumulates a permutation matrix, which reorders the components of transformed vectors to be in YZWX order.
| void shz_xmtrx_apply_self | ( | void | ) |
Multiplies and accumulatse the XMTRX matrix by itself, squaring it.
| void shz_xmtrx_translate | ( | float | x, |
| float | y, | ||
| float | z ) |
Multiplies and accumulates XMTRX by a 3D translation matrix with the given components (glTranslatef() equivalent).
| void shz_xmtrx_scale | ( | float | x, |
| float | y, | ||
| float | z ) |
Multiplies and accumulates XMTRX by a 3D scaling matrix with the given components (glScalef() equivalent).
| void shz_xmtrx_rotate_x | ( | float | radians | ) |
Multiplies and accumulates XMTRX by a 3D rotation matrix about the X axis.
| void shz_xmtrx_rotate_y | ( | float | radians | ) |
Multiplies and accumulates XMTRX by a 3D rotation matrix about the Y axis.
| void shz_xmtrx_rotate_z | ( | float | radians | ) |
Multiplies and accumulates XMTRX by a 3D rotation matrix about the Z axis.
| void shz_xmtrx_rotate_xyz | ( | float | xRadians, |
| float | yRadians, | ||
| float | zRadians ) |
Multiplies and accumulates XMTRX by 3D rotation matrices about the X then Y then Z axes.
| void shz_xmtrx_rotate_zyx | ( | float | zRadians, |
| float | yRadians, | ||
| float | xRadians ) |
Multiplies and accumulates XMTRX by 3D rotation matrices about the Z then Y then X axes.
| void shz_xmtrx_rotate_zxy | ( | float | zRadians, |
| float | xRadians, | ||
| float | yRadians ) |
Multiplies and accumulates XMTRX by 3D rotation matrices about the Z then X then Y axes.
| void shz_xmtrx_rotate_yxz | ( | float | yRadians, |
| float | xRadians, | ||
| float | zRadians ) |
Multiplies and accumulates XMTRX by 3D rotation matrices about the Y then X then Z axes.
| void shz_xmtrx_rotate | ( | float | radians, |
| float | xAxis, | ||
| float | yAxis, | ||
| float | zAxis ) |
Multiplies and accumulates XMTRX by the 3D rotation matrix formed by the given axis and angle (glRotatef equivalent).
| void shz_xmtrx_load_apply_4x4 | ( | const shz_mat4x4_t * | matrix1, |
| const shz_mat4x4_t * | matrix2 ) |
Loads XMTRX with the result of applying matrix2 onto matrix1.
This operation is equivalent to: shz_xmtrx_load_4x4(matrix1); shz_xmtrx_apply_4x4(matrix2);
However, it has been optimized and pipelined for performing the load and multiply in parallel.
| void shz_xmtrx_load_apply_unaligned_4x4 | ( | const float | matrix1[16], |
| const float | matrix2[16] ) |
Loads XMTRX with the result of applying unaligned matrix2 onto matrix1.
This routine is equivalent to shz_xmtrx_load_apply_4x4(), except that the two operand matrices do not require 8-byte alignment and can simply be 16-element single-precision float arrays.
| void shz_xmtrx_apply_store_4x4 | ( | shz_mat4x4_t * | out, |
| const shz_mat4x4_t * | in ) |
Multiplies XMTRX by the matrix, in, storing the result within the matrix, out.
This routine is roughly equivalent to: shz_xmtrx_apply_4x4(in); shz_xmtrx_store_4x4(out);
However, it has been optimized and pipelined for performing the multiply and store in parallel.
| void shz_xmtrx_apply_store_unaligned_4x4 | ( | float | out[16], |
| const float | in[16] ) |
Multiplies XMTRX by the unaligned matrix, in, storing the result within the unaligned matrix, out.
This routine is roughly equivalent to: shz_xmtrx_apply_unaligned_4x4(in); shz_xmtrx_store_unaligned_4x4(out);
However, it has been optimized and pipelined for performing the multiply and store in parallel.
| void shz_xmtrx_load_apply_store_4x4 | ( | shz_mat4x4_t * | out, |
| const shz_mat4x4_t * | matrix1, | ||
| const shz_mat4x4_t * | matrix2 ) |
Loads XMTRX with the 4x4 result of applying matrix2 onto matrix1, storing the result.
This operation is equivalent to: shz_xmtrx_load_4x4(matrix1); shz_xmtrx_apply_4x4(matrix2); shz_xmtrx_store_4x4(out);
However, it has been optimized and pipelined for performing the loads, multiplies, and stores in parallel.
| void shz_xmtrx_load_apply_store_unaligned_4x4 | ( | float | out[16], |
| const float | matrix1[16], | ||
| const float | matrix2[16] ) |
Loads XMTRX with the result of applying unaligned matrix2 onto unaligned matrix1, storing the result.
This routine is equivalent to shz_xmtrx_load_apply_store_4x4(), except that the three operand matrices do not require 8-byte alignment and can simply be 16-element single-precision float arrays.
| void shz_xmtrx_load_apply_store_3x4 | ( | shz_mat3x4_t * | out, |
| const shz_mat3x4_t * | matrix1, | ||
| const shz_mat3x4_t * | matrix2 ) |
Loads XMTRX with the 3x4 result of applying matrix2 onto matrix1, storing the result.
This operation is equivalent to: shz_xmtrx_load_3x4(matrix1); shz_xmtrx_apply_3x4(matrix2); shz_xmtrx_store_3x4(out);
However, it has been optimized and pipelined for performing the loads, multiplies, and stores in parallel.
| void shz_xmtrx_load_apply_store_3x3 | ( | shz_mat3x3_t * | out, |
| const shz_mat3x3_t * | matrix1, | ||
| const shz_mat3x3_t * | matrix2 ) |
Loads XMTRX with the 3x3 result of applying matrix2 onto matrix1, storing the result.
This operation is equivalent to: shz_xmtrx_load_3x3(matrix1); shz_xmtrx_apply_3x3(matrix2); shz_xmtrx_store_3x3(out);
However, it has been optimized and pipelined for performing the loads, multiplies, and stores in parallel.
| shz_vec4_t shz_xmtrx_transform_vec4 | ( | shz_vec4_t | vec | ) |
Returns the 4D vector that is the result of transforming vec by XMTRX.
| shz_vec3_t shz_xmtrx_transform_vec3 | ( | shz_vec3_t | vec | ) |
Returns the 3D vector that is the result of transforming vec by XMTRX.
| shz_vec2_t shz_xmtrx_transform_vec2 | ( | shz_vec2_t | vec | ) |
Returns the 2D vector that is the result of transforming vec by XMTRX.
| shz_vec2_t shz_xmtrx_transform_point2 | ( | shz_vec2_t | pt | ) |
Returns the 2D point that is the result of transforming pt by XMTRX.
| shz_vec3_t shz_xmtrx_transform_point3 | ( | shz_vec3_t | pt | ) |
Returns the 3D point that is the result of transforming pt by XMTRX.
| void shz_xmtrx_set_translation | ( | float | x, |
| float | y, | ||
| float | z ) |
Sets only the translational components of XMTRX to the given values.
| shz_vec3_t shz_xmtrx_get_translation | ( | void | ) |
Returns the translational components from the last column of XMTRX, as a 3D vector.
| void shz_xmtrx_add_4x4 | ( | const shz_mat4x4_t * | mat | ) |
Adds each element within mat to each element within XMTRX, storing the result in XMTRX.
| void shz_xmtrx_sub_4x4 | ( | const shz_mat4x4_t * | mat | ) |
Subtracts each element within mat from each element within XMTRX, storing the result in XMTRX.
| void shz_xmtrx_add_symmetric_skew | ( | float | x, |
| float | y, | ||
| float | z ) |
Adds the values of a 3D symmetric skew matrix constructed from the given components to XMTRX.
| void shz_xmtrx_add_diagonal | ( | float | x, |
| float | y, | ||
| float | z, | ||
| float | w ) |
Adds the values of a 4D diagonal matrix constructed from the given components to XMTRX.
| void shz_xmtrx_transpose | ( | void | ) |
Transposes the elements within XMTRX, in-place.
| void shz_xmtrx_negate | ( | void | ) |
Negates each element held within XMTRX.
| void shz_xmtrx_abs | ( | void | ) |
Takes the absolute value of each element held within XMTRX.
| void shz_xmtrx_init_fft_weights | ( | float | radians | ) |
Initializes XMTRX to the sin/cos weights used to multiply two samples within an FFT.
| shz_quat_t shz_xmtrx_to_quat | ( | void | ) |
Constructs a quaternion from the 3D rotation matrix within XMTRX.
| float shz_xmtrx_determinant | ( | void | ) |
Returns the determinant of XMTRX.
| void shz_xmtrx_invert | ( | void | ) |
Inverts XMTRX in-place.
Stores XMTRX to memory, computes the inverse via shz_mat4x4_inverse(), and reloads the result.