|
SH4ZAM! 0.1.0
Fast math library for the Sega Dreamcast's SH4 CPU
|
|
SH4ZAM! 0.1.0
Fast math library for the Sega Dreamcast's SH4 CPU
|
#include "shz_vector.h"#include "shz_quat.h"#include "shz_xmtrx.h"#include "inline/shz_matrix.inl.h"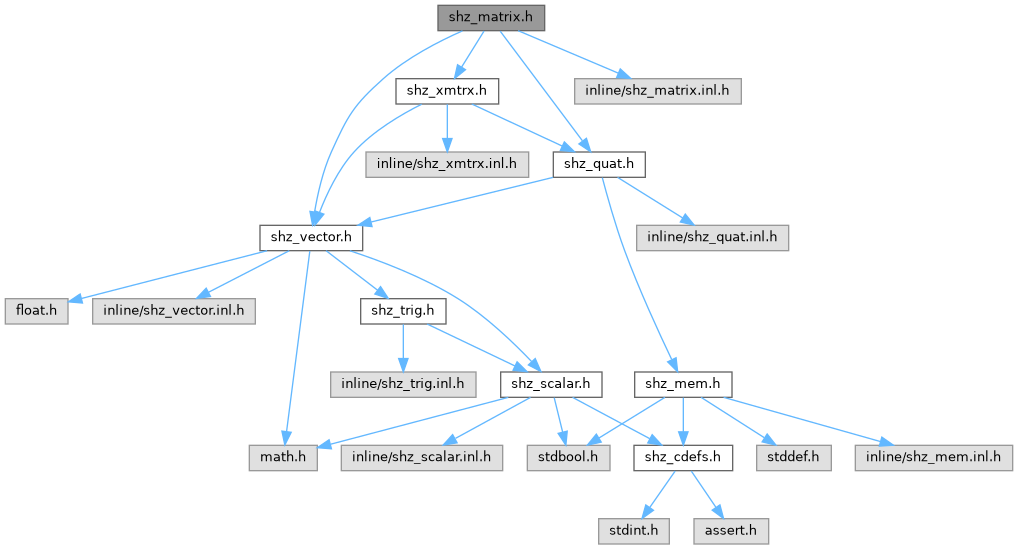
Go to the source code of this file.
Data Structures | |
| struct | shz_mat4x4_t |
Typedefs | |
| typedef shz_mat4x4_t | shz_mat4x4 |
Functions | |
Initialization | |
Routines for fully initializing a matrix. | |
| void | shz_mat4x4_init_identity (shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_identity_safe (shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_zero (shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_one (shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_fill (shz_mat4x4_t *mat, float value) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_translation (shz_mat4x4_t *mat, float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_scale (shz_mat4x4_t *mat, float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_rotation_x (shz_mat4x4_t *mat, float xAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_rotation_y (shz_mat4x4_t *mat, float yAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_rotation_z (shz_mat4x4_t *mat, float zAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_rotation_xyz (shz_mat4x4_t *mat, float xAngle, float yAngle, float zAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_rotation_zyx (shz_mat4x4_t *mat, float zAngle, float yAngle, float xAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_rotation_zxy (shz_mat4x4_t *mat, float zAngle, float xAngle, float yAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_rotation_yxz (shz_mat4x4_t *mat, float yAngle, float xAngle, float zAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_rotation (shz_mat4x4_t *mat, float radians, float xAxis, float yAxis, float zAxis) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_rotation_quat (shz_mat4x4_t *m, shz_quat_t q) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_diagonal (shz_mat4x4_t *mat, float x, float y, float z, float w) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_upper_triangular (shz_mat4x4_t *mat, float col1, shz_vec2_t col2, shz_vec3_t col3, shz_vec4_t col4) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_lower_triangular (shz_mat4x4_t *mat, shz_vec4_t col1, shz_vec3_t col2, shz_vec2_t col3, float col4) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_symmetric_skew (shz_mat4x4_t *mat, float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_outer_product (shz_mat4x4_t *mat, shz_vec4_t v1, shz_vec4_t v2) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_permutation_wxyz (shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_permutation_yzwx (shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_screen (shz_mat4x4_t *mat, float width, float height) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_lookat (shz_mat4x4_t *mat, shz_vec3_t eye, shz_vec3_t center, shz_vec3_t up) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_ortho (shz_mat4x4_t *mat, float left, float right, float bottom, float top, float znear, float zfar) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_frustum (shz_mat4x4_t *mat, float left, float right, float bottom, float top, float znear, float zfar) SHZ_NOEXCEPT |
| void | shz_mat4x4_init_perspective (shz_mat4x4_t *mat, float fov, float aspect, float znear) SHZ_NOEXCEPT |
Decomposition | |
Routines for decomposing a matrix into its constituent transforms. | |
| void | shz_mat4x4_decompose (const shz_mat4x4_t *mat, shz_vec3_t *translation, shz_quat_t *rotation, shz_vec3_t *scale) SHZ_NOEXCEPT |
Getting | |
Routines for getting specific values within a matrix. | |
| shz_vec4_t | shz_mat4x4_row (const shz_mat4x4_t *mat, size_t row) SHZ_NOEXCEPT |
| shz_vec4_t | shz_mat4x4_col (const shz_mat4x4_t *mat, size_t col) SHZ_NOEXCEPT |
| shz_vec3_t | shz_mat4x4_get_translation (const shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| float | shz_mat4x4_determinant (const shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| float | shz_mat4x4_trace (const shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| void | shz_mat4x4_3x3 (const shz_mat4x4_t *mat4, shz_mat3x3_t *mat3) SHZ_NOEXCEPT |
| void | shz_mat4x4_3x3_inverse_unscaled (const shz_mat4x4_t *mat4, shz_mat3x3_t *invmat3) SHZ_NOEXCEPT |
| void | shz_mat4x4_3x3_inverse (const shz_mat4x4_t *mat4, shz_mat3x3_t *invmat3) SHZ_NOEXCEPT |
| float | shz_mat4x4_3x3_determinant (const shz_mat4x4_t *mat) SHZ_NOEXCEPT |
Setting | |
Routines for setting specific values within a matrix | |
| void | shz_mat4x4_set_row (shz_mat4x4_t *mat, size_t row, shz_vec4_t vec) SHZ_NOEXCEPT |
| void | shz_mat4x4_set_col (shz_mat4x4_t *mat, size_t col, shz_vec4_t vec) SHZ_NOEXCEPT |
| void | shz_mat4x4_swap_rows (shz_mat4x4_t *mat, size_t row1, size_t row2) SHZ_NOEXCEPT |
| void | shz_mat4x4_swap_cols (shz_mat4x4_t *mat, size_t col1, size_t col2) SHZ_NOEXCEPT |
| void | shz_mat4x4_set_translation (shz_mat4x4_t *mat, float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_mat4x4_set_scale (shz_mat4x4_t *mat, float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_mat4x4_set_rotation_quat (shz_mat4x4_t *m, shz_quat_t q) SHZ_NOEXCEPT |
| void | shz_mat4x4_set_diagonal (shz_mat4x4_t *mat, float x, float y, float z, float w) SHZ_NOEXCEPT |
Applying | |
Routines for multiplying and accumulating onto the given matrix. | |
| void | shz_mat4x4_apply (shz_mat4x4_t *dst, const shz_mat4x4_t *src) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_unaligned (shz_mat4x4_t *dst, const float src[16]) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_transpose (shz_mat4x4_t *dst, const shz_mat4x4_t *src) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_transpose_unaligned (shz_mat4x4_t *dst, const float src[16]) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_translation (shz_mat4x4_t *mat, float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_scale (shz_mat4x4_t *mat, float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_rotation_x (shz_mat4x4_t *mat, float xAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_rotation_y (shz_mat4x4_t *mat, float yAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_rotation_z (shz_mat4x4_t *mat, float zAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_rotation_xyz (shz_mat4x4_t *mat, float xAngle, float yAngle, float zAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_rotation_zyx (shz_mat4x4_t *mat, float zAngle, float yAngle, float xAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_rotation_zxy (shz_mat4x4_t *mat, float zAngle, float xAngle, float yAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_rotation_yxz (shz_mat4x4_t *mat, float yAngle, float xAngle, float zAngle) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_rotation (shz_mat4x4_t *mat, float angle, float xAxis, float yAxis, float zAxis) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_rotation_quat (shz_mat4x4_t *m, shz_quat_t q) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_lookat (shz_mat4x4_t *m, shz_vec3_t pos, shz_vec3_t target, shz_vec3_t up) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_ortho (shz_mat4x4_t *m, float left, float right, float bottom, float top, float znear, float zfar) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_frustum (shz_mat4x4_t *m, float left, float right, float bottom, float top, float znear, float zfar) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_perspective (shz_mat4x4_t *m, float fov, float aspect, float znear) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_screen (shz_mat4x4_t *m, float width, float height) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_symmetric_skew (shz_mat4x4_t *mat, float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_permutation_wxyz (shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_permutation_yzwx (shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| void | shz_mat4x4_apply_self (shz_mat4x4_t *mat) SHZ_NOEXCEPT |
GL Transformations | |
OpenGL-style 4x4 matrix transforms. | |
| void | shz_mat4x4_translate (shz_mat4x4_t *mat, float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_mat4x4_scale (shz_mat4x4_t *mat, float x, float y, float z) SHZ_NOEXCEPT |
| void | shz_mat4x4_rotate_x (shz_mat4x4_t *mat, float radians) SHZ_NOEXCEPT |
| void | shz_mat4x4_rotate_y (shz_mat4x4_t *mat, float radians) SHZ_NOEXCEPT |
| void | shz_mat4x4_rotate_z (shz_mat4x4_t *mat, float radians) SHZ_NOEXCEPT |
| void | shz_mat4x4_rotate_xyz (shz_mat4x4_t *mat, float xRadians, float yRadians, float zRadians) SHZ_NOEXCEPT |
| void | shz_mat4x4_rotate_zyx (shz_mat4x4_t *mat, float zRadians, float yRadians, float xRadians) SHZ_NOEXCEPT |
| void | shz_mat4x4_rotate_zxy (shz_mat4x4_t *mat, float zRadians, float xRadians, float yRadians) SHZ_NOEXCEPT |
| void | shz_mat4x4_rotate_yxz (shz_mat4x4_t *mat, float yRadians, float xRadians, float zRadians) SHZ_NOEXCEPT |
| void | shz_mat4x4_rotate (shz_mat4x4_t *mat, float radians, float xAxis, float yAxis, float zAxis) SHZ_NOEXCEPT |
Transforming | |
Routines for transforming vectors and points by a matrix. | |
| void | shz_mat4x4_mult (shz_mat4x4_t *mat, const shz_mat4x4_t *lhs, const shz_mat4x4_t *rhs) SHZ_NOEXCEPT |
| void | shz_mat4x4_mult_unaligned (shz_mat4x4_t *mat, const shz_mat4x4_t *lhs, const float rhs[16]) SHZ_NOEXCEPT |
| void | shz_mat4x4_mult_transpose (shz_mat4x4_t *mat, const shz_mat4x4_t *lhs, const shz_mat4x4_t *rhs) SHZ_NOEXCEPT |
| void | shz_mat4x4_mult_transpose_unaligned (shz_mat4x4_t *mat, const shz_mat4x4_t *lhs, const float rhs[16]) SHZ_NOEXCEPT |
| shz_vec2_t | shz_mat4x4_transform_vec2 (const shz_mat4x4_t *m, shz_vec2_t v) SHZ_NOEXCEPT |
| shz_vec3_t | shz_mat4x4_transform_vec3 (const shz_mat4x4_t *m, shz_vec3_t v) SHZ_NOEXCEPT |
| shz_vec4_t | shz_mat4x4_transform_vec4 (const shz_mat4x4_t *mat, shz_vec4_t in) SHZ_NOEXCEPT |
| shz_vec2_t | shz_mat4x4_transform_vec2_transpose (const shz_mat4x4_t *m, shz_vec2_t v) SHZ_NOEXCEPT |
| shz_vec3_t | shz_mat4x4_transform_vec3_transpose (const shz_mat4x4_t *m, shz_vec3_t v) SHZ_NOEXCEPT |
| shz_vec4_t | shz_mat4x4_transform_vec4_transpose (const shz_mat4x4_t *m, shz_vec4_t v) SHZ_NOEXCEPT |
| shz_vec2_t | shz_mat4x4_transform_point2 (const shz_mat4x4_t *mat, shz_vec2_t pt) SHZ_NOEXCEPT |
| shz_vec3_t | shz_mat4x4_transform_point3 (const shz_mat4x4_t *mat, shz_vec3_t pt) SHZ_NOEXCEPT |
| shz_vec2_t | shz_mat4x4_transform_point2_transpose (const shz_mat4x4_t *mat, shz_vec2_t pt) SHZ_NOEXCEPT |
| shz_vec3_t | shz_mat4x4_transform_point3_transpose (const shz_mat4x4_t *mat, shz_vec3_t pt) SHZ_NOEXCEPT |
Miscellaneous | |
Other matrix-related operations and routines | |
| shz_quat_t | shz_mat4x4_to_quat (const shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| void | shz_mat4x4_transpose (const shz_mat4x4_t *mat, shz_mat4x4_t *out) SHZ_NOEXCEPT |
| void | shz_mat4x4_inverse (const shz_mat4x4_t *SHZ_RESTRICT mtrx, shz_mat4x4_t *SHZ_RESTRICT out) SHZ_NOEXCEPT |
| void | shz_mat4x4_inverse_block_triangular (const shz_mat4x4_t *mtx, shz_mat4x4_t *out) SHZ_NOEXCEPT |
| bool | shz_mat4x4_equal (const shz_mat4x4_t *SHZ_RESTRICT mat1, const shz_mat4x4_t *mat2) SHZ_NOEXCEPT |
| bool | shz_mat4x4_is_block_triangular (const shz_mat4x4_t *mat) SHZ_NOEXCEPT |
| void | shz_mat4x4_copy (shz_mat4x4_t *dst, const shz_mat4x4_t *src) SHZ_NOEXCEPT |
| void | shz_mat4x4_copy_unaligned (shz_mat4x4_t *dst, const float src[16]) SHZ_NOEXCEPT |
| void | shz_mat4x4_swap (shz_mat4x4_t *matA, shz_mat4x4_t *matB) SHZ_NOEXCEPT |
API for operating on MxN matrices within memory.
This file provides a collection of routines for manipulating MxN matrices which are stored within memory, rather than in the XMTRX FP register back-bank.
Some of these routines are simply loading into the back-bank and are performing work there, temporarily. Some of them have implementations which have specific optimizations for when the matrices are NOT within such registers, which are faster than having to go through XMTRX and clobbering the back-bank.
Definition in file shz_matrix.h.
| typedef shz_mat4x4_t shz_mat4x4 |
Alternate shz_mat4x4_t C typedef for those who hate POSIX style.
Definition at line 84 of file shz_matrix.h.
| void shz_mat4x4_init_identity | ( | shz_mat4x4_t * | mat | ) |
Initializes the given matrix to the identity matrix as fast as possible.
| void shz_mat4x4_init_identity_safe | ( | shz_mat4x4_t * | mat | ) |
Initializes the given matrix to the identity matrix, safely zeroing out NaN values.
| void shz_mat4x4_init_zero | ( | shz_mat4x4_t * | mat | ) |
Initializes the given matrix with all 0s for its element values.
| void shz_mat4x4_init_one | ( | shz_mat4x4_t * | mat | ) |
Initializes the given matrix with all 1s for its element values.
| void shz_mat4x4_init_fill | ( | shz_mat4x4_t * | mat, |
| float | value ) |
Initializes the given matrix with all elements assigned to the given value.
| void shz_mat4x4_init_translation | ( | shz_mat4x4_t * | mat, |
| float | x, | ||
| float | y, | ||
| float | z ) |
Initializes the given matrix to a 3D translation matrix with the given coordinates.
| void shz_mat4x4_init_scale | ( | shz_mat4x4_t * | mat, |
| float | x, | ||
| float | y, | ||
| float | z ) |
Initializes the given matrix to a 3D scaling matrix with the given dimensions.
| void shz_mat4x4_init_rotation_x | ( | shz_mat4x4_t * | mat, |
| float | xAngle ) |
Initializes the given matrix to a 3D rotation matrix by xAngle radians over the X-axis.
| void shz_mat4x4_init_rotation_y | ( | shz_mat4x4_t * | mat, |
| float | yAngle ) |
Initializes the given matrix to a 3D rotation matrix by yAngle radians over the Y-axis.
| void shz_mat4x4_init_rotation_z | ( | shz_mat4x4_t * | mat, |
| float | zAngle ) |
Initializes the given matrix to a 3D rotation matrix by zAngle radians over the Z-axis.
| void shz_mat4x4_init_rotation_xyz | ( | shz_mat4x4_t * | mat, |
| float | xAngle, | ||
| float | yAngle, | ||
| float | zAngle ) |
Initializes the given matrix to a 3D rotation matrix from the intrinsic rotation created by the given Tait-Bryan X-Y-Z angles.
| void shz_mat4x4_init_rotation_zyx | ( | shz_mat4x4_t * | mat, |
| float | zAngle, | ||
| float | yAngle, | ||
| float | xAngle ) |
Initializes the given matrix to a 3D rotation matrix from the intrinsic rotation created by the given Tait-Bryan Z-Y-X angles.
| void shz_mat4x4_init_rotation_zxy | ( | shz_mat4x4_t * | mat, |
| float | zAngle, | ||
| float | xAngle, | ||
| float | yAngle ) |
Initializes the given matrix to a 3D rotation matrix from the intrinsic rotation created by the given Tait-Bryan Z-X-Y angles.
| void shz_mat4x4_init_rotation_yxz | ( | shz_mat4x4_t * | mat, |
| float | yAngle, | ||
| float | xAngle, | ||
| float | zAngle ) |
Initializes the given matrix to a 3D rotation matrix from the intrinsic rotation created by the given Tait-Bryan Y-X-Z angles.
| void shz_mat4x4_init_rotation | ( | shz_mat4x4_t * | mat, |
| float | radians, | ||
| float | xAxis, | ||
| float | yAxis, | ||
| float | zAxis ) |
Initializes the given matrix to a 3D rotation matrix about the given axis rotated by angle radians.
| void shz_mat4x4_init_rotation_quat | ( | shz_mat4x4_t * | m, |
| shz_quat_t | q ) |
Initializes the given matrix to a 3D rotation matrix with its orientation given by a quaternion.
| void shz_mat4x4_init_diagonal | ( | shz_mat4x4_t * | mat, |
| float | x, | ||
| float | y, | ||
| float | z, | ||
| float | w ) |
Initializes the given matrix to a diagonal matrix with the given 4 values.
| void shz_mat4x4_init_upper_triangular | ( | shz_mat4x4_t * | mat, |
| float | col1, | ||
| shz_vec2_t | col2, | ||
| shz_vec3_t | col3, | ||
| shz_vec4_t | col4 ) |
Initializes the given matrix to an upper triangular matrix whose nonzero entries have the given value.
| void shz_mat4x4_init_lower_triangular | ( | shz_mat4x4_t * | mat, |
| shz_vec4_t | col1, | ||
| shz_vec3_t | col2, | ||
| shz_vec2_t | col3, | ||
| float | col4 ) |
Initializes the given matrix to a lower triangular matrix whose nonzero entries have the given value.
| void shz_mat4x4_init_symmetric_skew | ( | shz_mat4x4_t * | mat, |
| float | x, | ||
| float | y, | ||
| float | z ) |
Initializes the given matrix to be the symmetric skew of the given 3D vector components.
| void shz_mat4x4_init_outer_product | ( | shz_mat4x4_t * | mat, |
| shz_vec4_t | v1, | ||
| shz_vec4_t | v2 ) |
Initializes the given matrix to be the result from taking the outer product of the two given 4D vectors.
| void shz_mat4x4_init_permutation_wxyz | ( | shz_mat4x4_t * | mat | ) |
Initializes the matrix to to a permutation matrix, which reorders the components of transformed vectors to be in WXYZ order.
| void shz_mat4x4_init_permutation_yzwx | ( | shz_mat4x4_t * | mat | ) |
Initializes the matrix to to a permutation matrix, which reorders the components of transformed vectors to be in YZWX order.
| void shz_mat4x4_init_screen | ( | shz_mat4x4_t * | mat, |
| float | width, | ||
| float | height ) |
Initializes the given matrix to the viewport matrix with the given dimenions.
| void shz_mat4x4_init_lookat | ( | shz_mat4x4_t * | mat, |
| shz_vec3_t | eye, | ||
| shz_vec3_t | center, | ||
| shz_vec3_t | up ) |
Initializes the given matrix to a "lookAt" view matrix.
| void shz_mat4x4_init_ortho | ( | shz_mat4x4_t * | mat, |
| float | left, | ||
| float | right, | ||
| float | bottom, | ||
| float | top, | ||
| float | znear, | ||
| float | zfar ) |
Initializes the given matrix to an orthographic projection matrix.
| void shz_mat4x4_init_frustum | ( | shz_mat4x4_t * | mat, |
| float | left, | ||
| float | right, | ||
| float | bottom, | ||
| float | top, | ||
| float | znear, | ||
| float | zfar ) |
Initializes the given matrix to a frustum projection matrix.
| void shz_mat4x4_init_perspective | ( | shz_mat4x4_t * | mat, |
| float | fov, | ||
| float | aspect, | ||
| float | znear ) |
Initializes the given matrix to a perspective projection matrix.
| void shz_mat4x4_decompose | ( | const shz_mat4x4_t * | mat, |
| shz_vec3_t * | translation, | ||
| shz_quat_t * | rotation, | ||
| shz_vec3_t * | scale ) |
Decomposes a 4x4 transform matrix into translation, rotation, and scale.
| shz_vec4_t shz_mat4x4_row | ( | const shz_mat4x4_t * | mat, |
| size_t | row ) |
Extracts the row index as a 4D row vector from the given matrix.
| shz_vec4_t shz_mat4x4_col | ( | const shz_mat4x4_t * | mat, |
| size_t | col ) |
Extracts the col index as a 4D column vector from the given matrix.
| shz_vec3_t shz_mat4x4_get_translation | ( | const shz_mat4x4_t * | mat | ) |
Returns the translational components from the 4th column as a 3D vector.
| float shz_mat4x4_determinant | ( | const shz_mat4x4_t * | mat | ) |
Returns the determinant of the given 4x4 matrix.
| float shz_mat4x4_trace | ( | const shz_mat4x4_t * | mat | ) |
Returns the trace of the given 4x4 matrix.
| void shz_mat4x4_3x3 | ( | const shz_mat4x4_t * | mat4, |
| shz_mat3x3_t * | mat3 ) |
Extracts the top-left 3x3 of the given 4D matrix.
| void shz_mat4x4_3x3_inverse_unscaled | ( | const shz_mat4x4_t * | mat4, |
| shz_mat3x3_t * | invmat3 ) |
Extracts and inverts the top-level, unscaled 3x3 of the given 4x4 matrix.
| void shz_mat4x4_3x3_inverse | ( | const shz_mat4x4_t * | mat4, |
| shz_mat3x3_t * | invmat3 ) |
Extracts and inverts the top-level 3x3 (which may be scaled) of the given 4x4 matrix.
| float shz_mat4x4_3x3_determinant | ( | const shz_mat4x4_t * | mat | ) |
Returns the determinant of the given 4x4 matrix's internal top-level 3x3 matrix.
| void shz_mat4x4_set_row | ( | shz_mat4x4_t * | mat, |
| size_t | row, | ||
| shz_vec4_t | vec ) |
Sets the values of mat at the given row to those of the 4D vector, vec.
| void shz_mat4x4_set_col | ( | shz_mat4x4_t * | mat, |
| size_t | col, | ||
| shz_vec4_t | vec ) |
Sets the values of mat at the given col to those of the 4D vector, vec.
| void shz_mat4x4_swap_rows | ( | shz_mat4x4_t * | mat, |
| size_t | row1, | ||
| size_t | row2 ) |
Swaps the 4D row vectors located at row1 and row2 within mat.
| void shz_mat4x4_swap_cols | ( | shz_mat4x4_t * | mat, |
| size_t | col1, | ||
| size_t | col2 ) |
Swaps the 4D column vectors located at col1 and col2 within mat.
| void shz_mat4x4_set_translation | ( | shz_mat4x4_t * | mat, |
| float | x, | ||
| float | y, | ||
| float | z ) |
Assigns only the 3D translation-related elements of the given matrix to the given values.
| void shz_mat4x4_set_scale | ( | shz_mat4x4_t * | mat, |
| float | x, | ||
| float | y, | ||
| float | z ) |
Assigns only the 3D scale-related elements of the given matrix to the given values.
| void shz_mat4x4_set_rotation_quat | ( | shz_mat4x4_t * | m, |
| shz_quat_t | q ) |
Sets just the rotational component of the matrix to the orientation given by a quaternion, keeping the other elements in-tact.
| void shz_mat4x4_set_diagonal | ( | shz_mat4x4_t * | mat, |
| float | x, | ||
| float | y, | ||
| float | z, | ||
| float | w ) |
Assigns only the 4 elements along the diagonal of the given matrix to the given values.
| void shz_mat4x4_apply | ( | shz_mat4x4_t * | dst, |
| const shz_mat4x4_t * | src ) |
Multiplies and accumulates the src 4x4 matrix onto the dst 4x4 matrix.
| void shz_mat4x4_apply_unaligned | ( | shz_mat4x4_t * | dst, |
| const float | src[16] ) |
Multiplies and accumulates the unaligned src 4x4 matrix onto the dst 4x4 matrix.
| void shz_mat4x4_apply_transpose | ( | shz_mat4x4_t * | dst, |
| const shz_mat4x4_t * | src ) |
Multiplies and accumulates the transposed src 4x4 matrix onto the dst 4x4 matrix.
| void shz_mat4x4_apply_transpose_unaligned | ( | shz_mat4x4_t * | dst, |
| const float | src[16] ) |
Multiplies and accumulates the transposed unaligned src 4x4 matrix onto the dst 4x4 matrix.
| void shz_mat4x4_apply_translation | ( | shz_mat4x4_t * | mat, |
| float | x, | ||
| float | y, | ||
| float | z ) |
Adds the given 3D vector components to the translational values of the given matrix.
| void shz_mat4x4_apply_scale | ( | shz_mat4x4_t * | mat, |
| float | x, | ||
| float | y, | ||
| float | z ) |
Multiplies and accumulates the scale-related elements of the given matrix by the given 3D components.
| void shz_mat4x4_apply_rotation_x | ( | shz_mat4x4_t * | mat, |
| float | xAngle ) |
Multiplies and accumulates a rotation matrix by xAngle radians about the X-axis onto the given matrix.
| void shz_mat4x4_apply_rotation_y | ( | shz_mat4x4_t * | mat, |
| float | yAngle ) |
Multiplies and accumulates a rotation matrix by yAngle radians about the Y-axis onto the given matrix.
| void shz_mat4x4_apply_rotation_z | ( | shz_mat4x4_t * | mat, |
| float | zAngle ) |
Multiplies and accumulates a rotation matrix by zAngle radians about the Z-axis onto the given matrix.
| void shz_mat4x4_apply_rotation_xyz | ( | shz_mat4x4_t * | mat, |
| float | xAngle, | ||
| float | yAngle, | ||
| float | zAngle ) |
Rotates the given transform matrix about the X axis, then the Y axis, then the Z axis by the given angles in radians.
Multiplies and accumulates the given matrix with the 3D rotation matrix formed from the intrinsic rotation created by the given Tait-Bryan X-Y-Z angles.
| void shz_mat4x4_apply_rotation_zyx | ( | shz_mat4x4_t * | mat, |
| float | zAngle, | ||
| float | yAngle, | ||
| float | xAngle ) |
Rotates the given transform matrix about the Z axis, then the Y axis, then the X axis by the given angles in radians.
Multiplies and accumulates the given matrix with the 3D rotation matrix formed from the intrinsic rotation created by the given Tait-Bryan Z-Y-X angles.
| void shz_mat4x4_apply_rotation_zxy | ( | shz_mat4x4_t * | mat, |
| float | zAngle, | ||
| float | xAngle, | ||
| float | yAngle ) |
Rotates the given transform matrix about the Z axis, then the X axis, then the Y axis by the given angles in radians.
Multiplies and accumulates the given matrix with the 3D rotation matrix formed from the intrinsic rotation created by the given Tait-Bryan Z-Y-X angles.
| void shz_mat4x4_apply_rotation_yxz | ( | shz_mat4x4_t * | mat, |
| float | yAngle, | ||
| float | xAngle, | ||
| float | zAngle ) |
Rotates the given transform matrix about the Y axis, then the X axis, then the Z axis by the given angles in radians.
Multiplies and accumulates the given matrix with the 3D rotation matrix formed from the intrinsic rotation created by the given Tait-Bryan Y-X-Z angles.
| void shz_mat4x4_apply_rotation | ( | shz_mat4x4_t * | mat, |
| float | angle, | ||
| float | xAxis, | ||
| float | yAxis, | ||
| float | zAxis ) |
Rotates the given transform matrix about the arbitrary axis given by a 3D direction vector and angle of rotation in radians.
Multiplies and accumulates the given matrix with the 3D rotation matrix formed from the intrinsic rotation created by the given Tait-Bryan Z-Y-X angles.
| void shz_mat4x4_apply_rotation_quat | ( | shz_mat4x4_t * | m, |
| shz_quat_t | q ) |
Multiplies and accumulates the given matrix with a rotation matrix whose orientation is given by a quaternion.
| void shz_mat4x4_apply_lookat | ( | shz_mat4x4_t * | m, |
| shz_vec3_t | pos, | ||
| shz_vec3_t | target, | ||
| shz_vec3_t | up ) |
Applies the 3D "lookAt" matrix constructed with the given vector components onto the given matrix.
| void shz_mat4x4_apply_ortho | ( | shz_mat4x4_t * | m, |
| float | left, | ||
| float | right, | ||
| float | bottom, | ||
| float | top, | ||
| float | znear, | ||
| float | zfar ) |
Multiplies and accumulates the ortho matrix constructed from the given values onto the given matrix.
| void shz_mat4x4_apply_frustum | ( | shz_mat4x4_t * | m, |
| float | left, | ||
| float | right, | ||
| float | bottom, | ||
| float | top, | ||
| float | znear, | ||
| float | zfar ) |
Multiplies and accumulates the frustum matrix constructed from the given values onto the given matrix.
| void shz_mat4x4_apply_perspective | ( | shz_mat4x4_t * | m, |
| float | fov, | ||
| float | aspect, | ||
| float | znear ) |
Multiplies and accumulates the perspective matrix constructed from the given values onto the given matrix.
| void shz_mat4x4_apply_screen | ( | shz_mat4x4_t * | m, |
| float | width, | ||
| float | height ) |
Multiplies and accumulates the viewport matrix created with the given components ont othe given matrix.
| void shz_mat4x4_apply_symmetric_skew | ( | shz_mat4x4_t * | mat, |
| float | x, | ||
| float | y, | ||
| float | z ) |
Multiplies and accumulates the given matrix with a symmetric skew matrix formed from the given 3D vector components.
| void shz_mat4x4_apply_permutation_wxyz | ( | shz_mat4x4_t * | mat | ) |
Multiplies and accumulates a permutation matrix, which reorders the components of transformed vectors to be in WXYZ order.
| void shz_mat4x4_apply_permutation_yzwx | ( | shz_mat4x4_t * | mat | ) |
Multiplies and accumulates a permutation matrix, which reorders the components of transformed vectors to be in YZWX order.
| void shz_mat4x4_apply_self | ( | shz_mat4x4_t * | mat | ) |
Multiplies and accumulates the given matrix onto itself.
| void shz_mat4x4_translate | ( | shz_mat4x4_t * | mat, |
| float | x, | ||
| float | y, | ||
| float | z ) |
Multiplies and accumulates mat by a 3D translation matrix with the given components.
| void shz_mat4x4_scale | ( | shz_mat4x4_t * | mat, |
| float | x, | ||
| float | y, | ||
| float | z ) |
Multiplies and accumulates mat by a 3D scaling matrix with the given components.
| void shz_mat4x4_rotate_x | ( | shz_mat4x4_t * | mat, |
| float | radians ) |
Multiplies and accumulates mat by a 3D rotation matrix about the X axis.
| void shz_mat4x4_rotate_y | ( | shz_mat4x4_t * | mat, |
| float | radians ) |
Multiplies and accumulates mat by a 3D rotation matrix about the Y axis.
| void shz_mat4x4_rotate_z | ( | shz_mat4x4_t * | mat, |
| float | radians ) |
Multiplies and accumulates mat by a 3D rotation matrix about the Z axis.
| void shz_mat4x4_rotate_xyz | ( | shz_mat4x4_t * | mat, |
| float | xRadians, | ||
| float | yRadians, | ||
| float | zRadians ) |
Multiplies and accumulates mat by 3D rotation matrices about the X then Y then Z axes.
| void shz_mat4x4_rotate_zyx | ( | shz_mat4x4_t * | mat, |
| float | zRadians, | ||
| float | yRadians, | ||
| float | xRadians ) |
Multiplies and accumulates mat by 3D rotation matrices about the Z then Y then X axes.
| void shz_mat4x4_rotate_zxy | ( | shz_mat4x4_t * | mat, |
| float | zRadians, | ||
| float | xRadians, | ||
| float | yRadians ) |
Multiplies and accumulates mat by 3D rotation matrices about the Z then X then Y axes.
| void shz_mat4x4_rotate_yxz | ( | shz_mat4x4_t * | mat, |
| float | yRadians, | ||
| float | xRadians, | ||
| float | zRadians ) |
Multiplies and accumulates mat by 3D rotation matrices about the Y then X then Z axes.
| void shz_mat4x4_rotate | ( | shz_mat4x4_t * | mat, |
| float | radians, | ||
| float | xAxis, | ||
| float | yAxis, | ||
| float | zAxis ) |
Multiplies and accumulates mat by the 3D rotation matrix formed by the given axis and angle.
| void shz_mat4x4_mult | ( | shz_mat4x4_t * | mat, |
| const shz_mat4x4_t * | lhs, | ||
| const shz_mat4x4_t * | rhs ) |
Multiplies two 4x4 matrices together, storing the result into a third.
| void shz_mat4x4_mult_unaligned | ( | shz_mat4x4_t * | mat, |
| const shz_mat4x4_t * | lhs, | ||
| const float | rhs[16] ) |
Multiplies two 4x4 matrices together, with the right handed matrix being unaligned, storing the result into a third.
| void shz_mat4x4_mult_transpose | ( | shz_mat4x4_t * | mat, |
| const shz_mat4x4_t * | lhs, | ||
| const shz_mat4x4_t * | rhs ) |
Multiplies the regular matrix, lhs, by the transpose of the matrix, rhs, storing the result into mat.
| void shz_mat4x4_mult_transpose_unaligned | ( | shz_mat4x4_t * | mat, |
| const shz_mat4x4_t * | lhs, | ||
| const float | rhs[16] ) |
Multiplies the regular matrix, lhs, by the transpose of the unaligned matrix, rhs, storing the result into mat.
| shz_vec2_t shz_mat4x4_transform_vec2 | ( | const shz_mat4x4_t * | m, |
| shz_vec2_t | v ) |
Transforms a 2D vector by a 4x4 matrix.
This is a routine specializing in one-off transforms of a single 2D vector by a single 4x4 matrix. It should be faster than going through XMTRX.
| shz_vec3_t shz_mat4x4_transform_vec3 | ( | const shz_mat4x4_t * | m, |
| shz_vec3_t | v ) |
Transforms a 3D vector by a 4x4 matrix.
This is a routine specializing in one-off transforms of a single 3D vector (such as a normal, without a W component) by a single 4x4 matrix. It should be faster than going through XMTRX.
| shz_vec4_t shz_mat4x4_transform_vec4 | ( | const shz_mat4x4_t * | mat, |
| shz_vec4_t | in ) |
Transforms a 4D vector by a 4x4 matrix.
This is a routine specializing in one-off transforms of a single 4D vector by a single 4x4 matrix. It should be faster than going through XMTRX.
| shz_vec2_t shz_mat4x4_transform_vec2_transpose | ( | const shz_mat4x4_t * | m, |
| shz_vec2_t | v ) |
Transforms a 2D vector the the transpose of a 4x4 matrix.
This is a routine specializing in one-off transforms of a single 2D vector by the transpose of a single 4x4 matrix. It should be faster than going through XMTRX.
| shz_vec3_t shz_mat4x4_transform_vec3_transpose | ( | const shz_mat4x4_t * | m, |
| shz_vec3_t | v ) |
Transforms a 3D vector the the transpose of a 4x4 matrix.
This is a routine specializing in one-off transforms of a single 3D vector by the transpose of a single 4x4 matrix. It should be faster than going through XMTRX.
| shz_vec4_t shz_mat4x4_transform_vec4_transpose | ( | const shz_mat4x4_t * | m, |
| shz_vec4_t | v ) |
Transforms a 4D vector the the transpose of a 4x4 matrix.
This is a routine specializing in one-off transforms of a single 4D vector by the transpose of a single 4x4 matrix. It should be faster than going through XMTRX.
| shz_vec2_t shz_mat4x4_transform_point2 | ( | const shz_mat4x4_t * | mat, |
| shz_vec2_t | pt ) |
Transforms a 2D point by a 4x4 matrix.
This is a routine specializing in one-off transforms of a single 2D point by a single 4x4 matrix. It should be faster than going through XMTRX.
| shz_vec3_t shz_mat4x4_transform_point3 | ( | const shz_mat4x4_t * | mat, |
| shz_vec3_t | pt ) |
Transforms a 3D point by a 4x4 matrix.
This is a routine specializing in one-off transforms of a single 3D point by a single 4x4 matrix. It should be faster than going through XMTRX.
| shz_vec2_t shz_mat4x4_transform_point2_transpose | ( | const shz_mat4x4_t * | mat, |
| shz_vec2_t | pt ) |
Transforms a 2D point by the transpose of a 4x4 matrix.
This is a routine specializing in one-off transforms of a single 2D point by the transpose of a a single 4x4 matrix. It should be faster than going through XMTRX.
| shz_vec3_t shz_mat4x4_transform_point3_transpose | ( | const shz_mat4x4_t * | mat, |
| shz_vec3_t | pt ) |
Transforms a 3D point by the transpose of a 4x4 matrix.
This is a routine specializing in one-off transforms of a single 3D point by the transpose of a a single 4x4 matrix. It should be faster than going through XMTRX.
| shz_quat_t shz_mat4x4_to_quat | ( | const shz_mat4x4_t * | mat | ) |
Converts the given 4x4 orientation matrix into a quaternion.
| void shz_mat4x4_transpose | ( | const shz_mat4x4_t * | mat, |
| shz_mat4x4_t * | out ) |
Stores the transpose of mat within out.
| void shz_mat4x4_inverse | ( | const shz_mat4x4_t *SHZ_RESTRICT | mtrx, |
| shz_mat4x4_t *SHZ_RESTRICT | out ) |
Computes the inverse of a 4x4 matrix.
| mtrx | Pointer to the 4x4 matrix to invert. |
| out | Pointer to the resulting inverted matrix. |
| void shz_mat4x4_inverse_block_triangular | ( | const shz_mat4x4_t * | mtx, |
| shz_mat4x4_t * | out ) |
Computes the inverse of a 4x4 matrix in block-triangular form.
This is a special-case faster optimization for 4x4 matrices which take the form:
A = [ M b ]
[ 0 w ]
Where A is 4x4, M is 3x3, b is 3x1, and the bottom row is (0, 0, 0, w) with w != 0. For this block-triangular form, det(A) = det(M) * w. Then
inv(A) = [ inv(M) -inv(M) * b / w ]
[ 0 1/w ]
| bool shz_mat4x4_equal | ( | const shz_mat4x4_t *SHZ_RESTRICT | mat1, |
| const shz_mat4x4_t * | mat2 ) |
Returns true if the two matrices are equal, based on either absolute or relative tolerance.
| bool shz_mat4x4_is_block_triangular | ( | const shz_mat4x4_t * | mat | ) |
Returns true if the given matrix is in block-triangular form: having a bottom row in the form of <0.0f, 0.0f, 0.0f, w>.
| void shz_mat4x4_copy | ( | shz_mat4x4_t * | dst, |
| const shz_mat4x4_t * | src ) |
Copies the given src 4x4 matrix into the given dst 4x4 matrix.
| void shz_mat4x4_copy_unaligned | ( | shz_mat4x4_t * | dst, |
| const float | src[16] ) |
Copies the given unaligned src 4x4 matrix into the given dst 4x4 matrix.
| void shz_mat4x4_swap | ( | shz_mat4x4_t * | matA, |
| shz_mat4x4_t * | matB ) |
Swaps the contents of the two given matrices, matA and matB.